อยากได้แบบฝึกหัดฟรีนับพัน (ไม่มีสิ่งรบกวนเลย)? Here’s how
DT
ได้รับความนิยมมากที่สุด
Newest
Oldest
A-Z
Z-A
Match the modules to the correct description
Decision Tree activity
Data Types
Try to select correct answer
Data Type Conversion
Put the pictures in the correct order.
Activity 7
Match each Term with correct explanation :
Try to select correct answers.
Select correct word and put it in suitable gap.
Select the correct answer
Are these statements True or False?
Labeeb is a robot
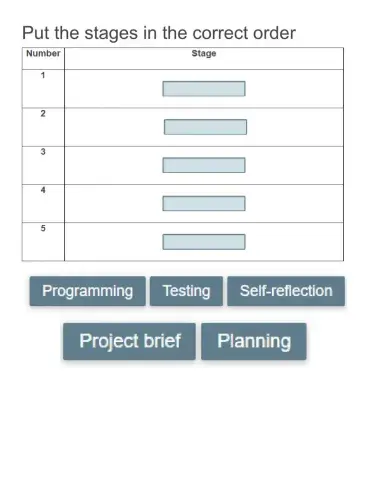
Systems Development Life Cycle for project
Noor is learning about how network protocols. Help her to fill in the blanks.
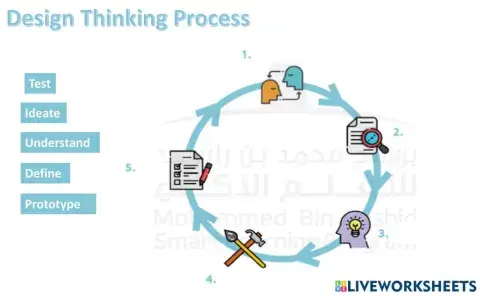
Try to put design thinking processes in correct order
Decision Tree
Hardware and Software Problems
Week 3 - G6 - Memory
Decomposition
Solve Activity 4
solve activity 9
Select the correct answers



 Switch to New Search Page
Switch to New Search Page